Status是一个开源多旋翼飞行器原型,也是一个硬软件学习平台,在未来的几个月甚至几年内,将不断更新、填充该项目;即将开发mini系列的6旋翼、8旋翼开源飞行器。
虽然她还有很多不足,但是她代表着我对梦想的执着。
硬件配置:
STM32F103CBT6
三轴陀螺仪+三轴加速度计 MPU6050
三轴电子罗盘 HMC5883L
气压计 MS5611
EEPROM AT24C02
2.4G无线 nRF24L01(遥控器为nRF24L01+RFX2401C PA功率放大器)
目前实现的功能:
自稳飞行
气压定高
无头模式
V0.2版本更新地址:https://mfweb.top/527.py
以下为V0.1的介绍:
飞行视频:
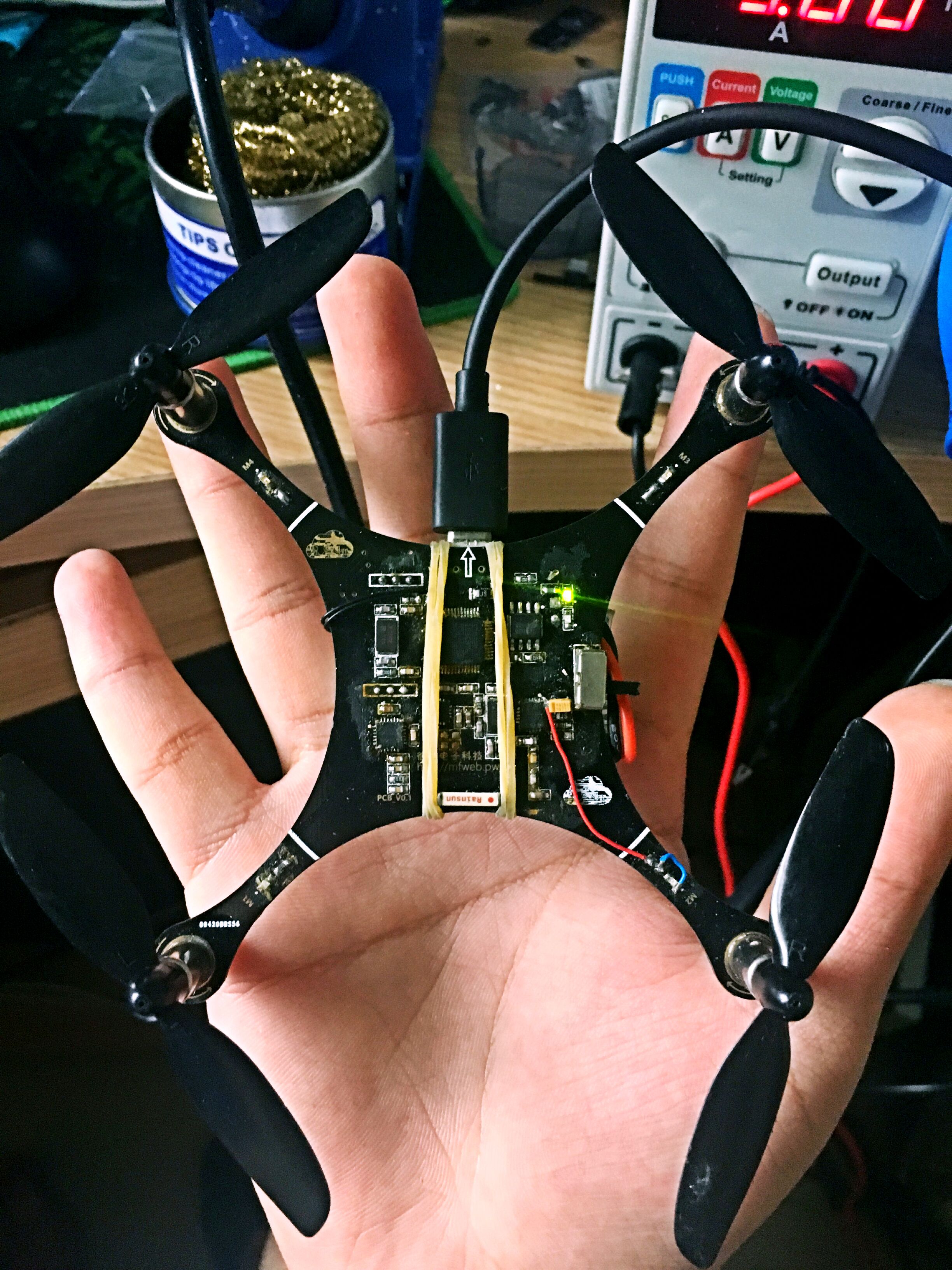
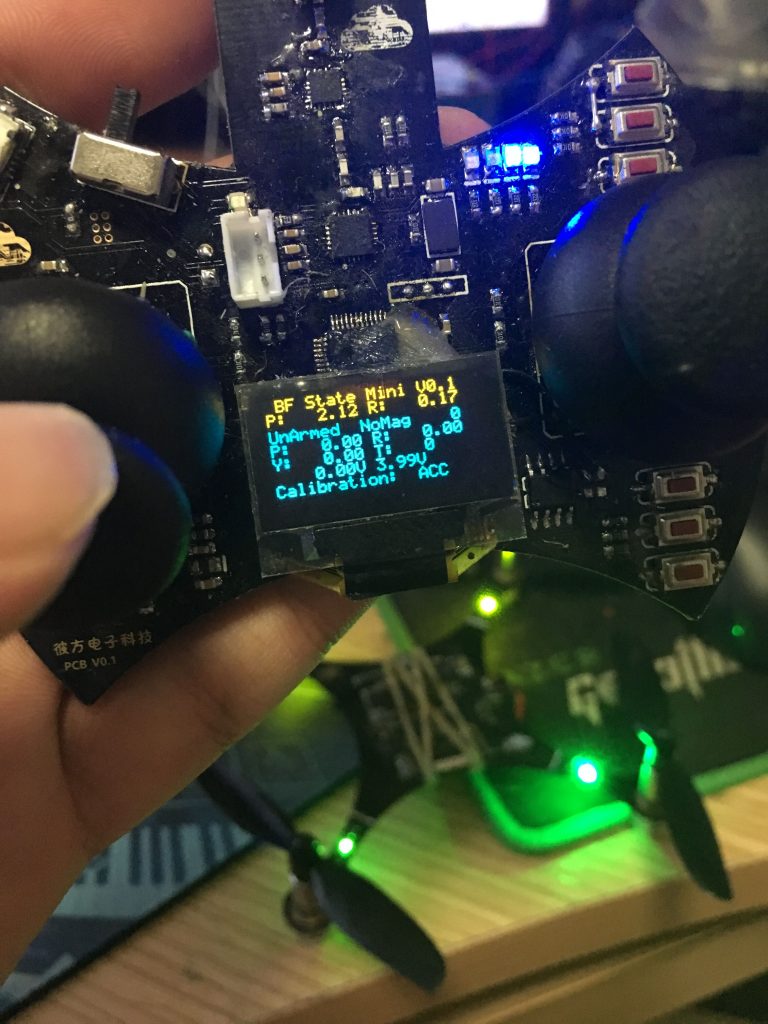
V0.1版本机身:
测试版本,刚开始做的时候在家里,工具不足焊完后没有清洗


V0.1版本遥控:

源码及原理图下载:
MDK5.0以上
发表回复